





더 나은 인간사회를 구현하고 세계적인 연구기관이 되기 위한 지능로봇기술 개발

피깅(Pigging)이 불가능한 배관의 비파괴 탐상을 위하 여, NDE(Non-Destructive Evaluation) 센서 시스템을 탑재하고 배관 내부를 주행하며 최적의 비파괴...
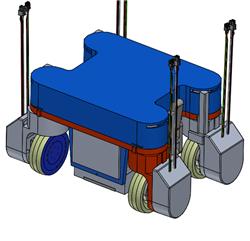
포스코 현장에 설치된 부생가스 및 원료 공급관 등의 건 전성 검토를 위한 배관의 상태 검사(두께 감육, 파공 등 의 검사)를 배관 외면에서 자동 주행, 검...

실제 환경에서 인간의 기본동작을 구현하여 학습할 수 있는 인간형 로봇 원천 기술을 개발하고 이를 응용하여 동계올림픽 스포츠인 스키의 동작들을 구현...
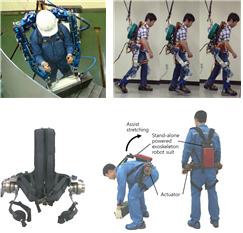
산업 근로자의 반복적인 중량물 이송과 장시간 노동에 따른 근골격계 질환 예방과 착용자 피로도 감소를 위한 착용형 근력지원 로봇시스템 개발

비정형 작업 및 반복 작업에서 오는 피로도 감소를 위한 엑소수트 기술로 근지구력 등의 보조적인 근력보조를 목 적으로 하고 상황에 따라 각개 모듈에 대...
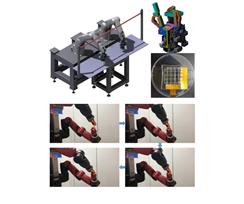
시각 및 촉각 정보를 활용한 조작 지능 및 공정 적용을 위한 로봇 기술 개발

가반하중 6kg 이상, 사이클타임 0.43sec 이내의 4축 병 렬로봇 개발

다중소재, 고신축성 소프트 센서 기반 착용형 센서 시스 템 개발 및 어플리케이션 적용 기술 개발
KOREA INSTITUTE OF ROBOTICS & TECHNOLOGY CONVERGENCE. ALL RIGHTS RESERVED.



